风电机组滑动式偏航系统动力学分析
发布时间:2015-04-13 来源: 《风能》 作者:王明 安利强 张家旗 张志强
本文摘要:滑动式偏航机构可以承受更大的荷载,而且省去了刹车及液压装置,逐渐被兆瓦级风电机组采用。但是由于机舱的重力载荷较大、叶片的气动载荷受风随机性的影响而变化复杂,从而导致滑动式偏航系统的滑动块与大齿圈间的摩擦阻尼情况复杂,容易导致偏航减速机载荷过大或滑动块磨损等故障。
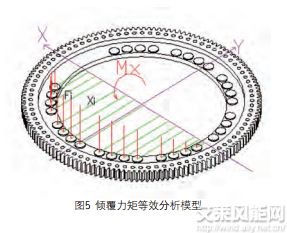
同理可以得到My的等效压力以及上滑动衬垫受到的倾覆力矩作用产生的压力。将偏航模型简化为一个在水平面上定轴转动的圆台,则每个摩擦片可简化为如图6的扇形块,R1和R2分别为摩擦片的外径和内径,Φ为张角,在摩擦片上取一微段dΦ,长度为dr,则摩擦力矩:
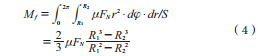
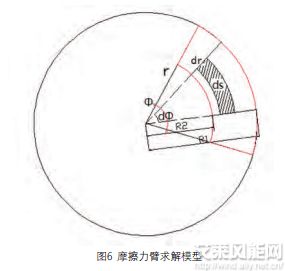
因此,摩擦力臂的等效长度为

(三)接触刚度
减速机齿轮接触力是基于IMPACT函数的接触模式,接触碰撞模型以Hertz弹性撞击理论分析为基础定义的,接触刚度系数K主要和碰撞物体的结构形状和材料有关。

式中

,其中ρ1、ρ2为两碰撞物体的当量半径;
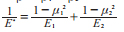
,其中,μ1、μ2分别是两个齿轮材料的泊松比,E1、E2分别是两个齿轮材料的杨氏模量。本文齿轮材料均选用20Cr2Ni4材料,其泊松比为0.29,弹性模量为2.07×105MPa。各对齿轮间啮合刚度值如表2。

结果讨论
设置各工况仿真参数,摩擦片的动摩擦因数为0.06,静摩擦因数为0.1,采用Step函数设置驱动,在ADAMS中进行动力学仿真。
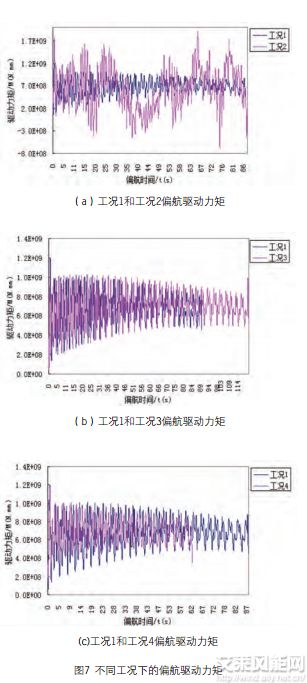
一、偏航驱动力矩
从图7中各工况下偏航驱动力矩的对比中可以看出,由于工况2为湍流等级为C级的湍流风,而工况1为普通阵风,从图7a可明显看到偏航总驱动力矩的波动情况,可见湍流风对风电机组偏航总驱动力矩影响很大。工况1、工况3和工况4的偏航驱动力矩幅值基本是相同的,但由于工况3偏航速度较小,在偏航开始时刻工况3偏航驱动力矩较小。不同的偏航速度(图7b)和不同的偏航角度(图7c)下,偏航所需时间是不同的。
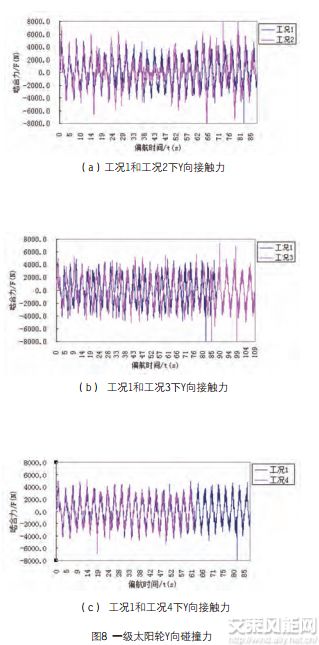
二、减速箱一级太阳轮接触力
从图8可以看出,齿轮碰撞力有明显的周期性,其变化频率与减速箱驱动转速有关,从图8a、8c可以看到,虽然碰撞力幅值不同,但是时域上基本上是重合的,因为其驱动转速是相同的,但是图8b中,碰撞力的时域上有明显的差异,可见工况1的碰撞力变化比工况3碰撞力变化快,即驱动转速越大,碰撞力变化越急,所以驱动转速会影响碰撞力的变化频率。从幅值看,图8a工况2下碰撞力的幅值明显较大,因为湍流风风速随机变化,导致偏航系统的负载出现幅值大范围波动。
分享到:
相关文章
- 风电机组滑动式偏航系统动力学分析2015-04-13 12:59:20
- 新技术让风能发电效率倍增2015-01-26 10:44:00
- 我国风力发电远程智能维护技术取得有效突破2015-01-26 11:04:25
- 风切变指数对风电场风力发电机组选型的影响2015-01-26 11:29:21
- “新斜轴风力发电机”技术让风能发电效率倍增2015-01-26 13:30:39
- 中国风电整机制造的微利时代
- 近年来,中国风电市场保持高速增长。2012年6月,中国并网风电5258万千瓦,取代美国成为世界第一风电大国。 然而,中国风电制造商的生...
招聘

- 北京天源科创招聘土建质检工程
- 北京天源科创风电技术有限责任公司,是国内第一家且目前规模最大的专业风电技术服务商,是新疆金风科技股份有限公司的控股子公司。
《风能产业观察》杂志



